课程简介
本课程将学习如何让小汽车实现加速、减速和转弯的各种控制方法,探索不同转弯方式的原理。
视频:加减速转弯讲解
目录
- 知识点
- 学习任务
- 搭建
- 编程
一、知识点
小车转弯的方式有哪些?
- 点转向:两个车轮转向相反,速度相同。小车以两个车轮中心点为圆心转圈。
- 单电机转向:一个车轮动,一个车轮不动。小车以不动的轮子为圆心转圈。
- 弧度转向:两个车轮转向相同,速度不同。
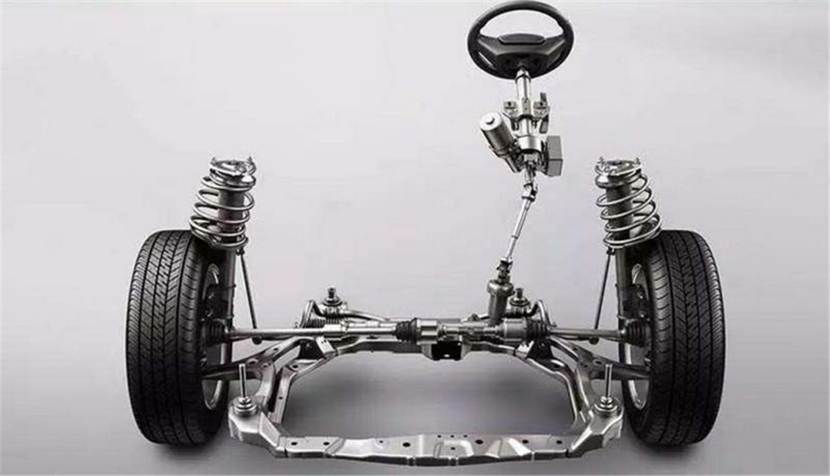
图1 汽车转向系统
二、学习任务
搭建一个车的模型,先加速直线运动,再减速直线运动,最后旋转。
三、搭建
1. 实验材料
arduino主控板模块、电池盒、连杆、支撑轮、底板、轮子、车轮卡扣、齿轮马达、开关、软硬导线
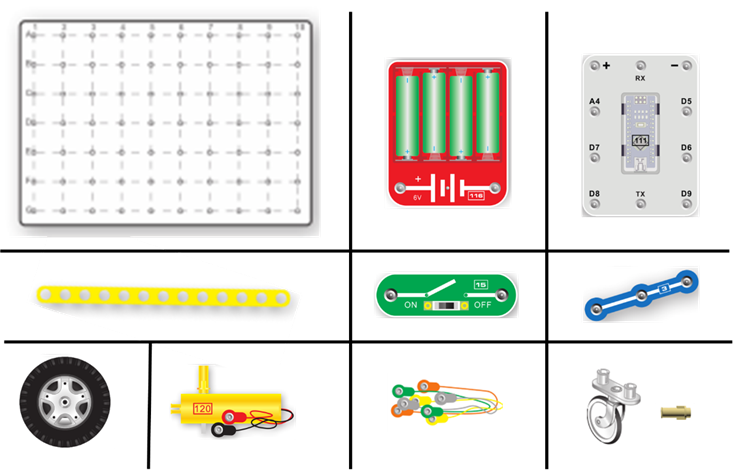
图2 实验材料图
2. 实际搭建图
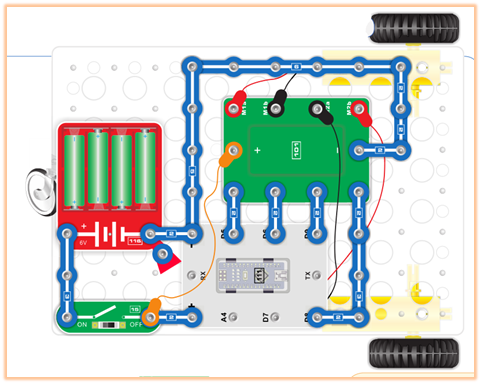
图3 搭建图
四、编程
1. 流程
- 自定义引脚及变量
- 自定义直行(带参数)、转弯及停止等函数
- 循环:加速运动(直行函数参数递增)-减速运动(直行函数参数递减)-转弯函数-延时...
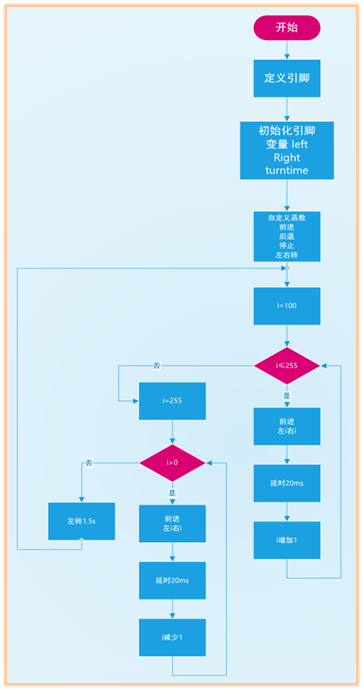
图4 流程图
2. IDE编程
- 自定义函数:停止(四引脚低电平)、前进(两高两低)、后退(两低两高)、转弯(左转或右转)
- Setup(初始化函数)中编写定义引脚模式及变量
- Loop(主循环函数):加速运动(参数递增到255)-减速运动(参数递减到0)-转弯函数-延时...
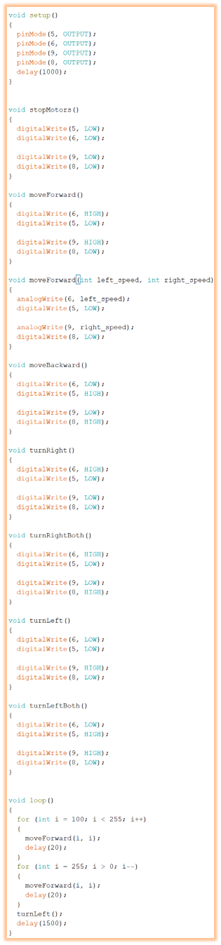
图5 IDE程序截图
3. 米思奇编程
- 自定义函数:停止(四引脚低电平)、前进(两高两低)、后退(两低两高)、转弯(左转或右转)
- Setup(初始化函数)中编写定义引脚模式及变量
- Loop(主循环函数):加速运动(参数递增到255)-减速运动(参数递减到0)-转弯函数-延时...
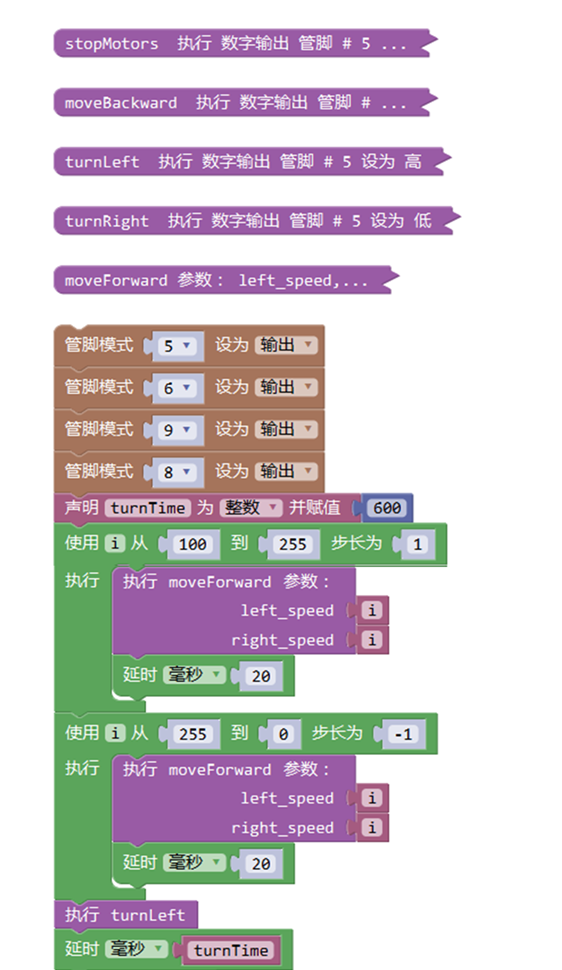
图6 米思奇程序截图